SmartDO eNews Oct. 28, 2009 : Concurrent Sizing, Shaping and Topology Optimization with SmartDO
2009-10-28
Introduction
In many situations of structural design, it is necessary to perform Concurrent Sizing, Shaping and Topology Optimization to achieve satisfactory both cost and performance requirement. Commonly seen applications are the supporting structure in rear trunk covers, chassis, tower structure, and other supporting structures.
A successful sizing, shaping and topology optimization can usually yield significant improvement to the structure. These new structures can then be repeatedly applied in the product, sometimes even patentable
Although there are many commercial packages available today that claim to perform topology optimization, the result is usually conceptual or non-deterministic, and requires further work to define its sizing and shaping parameters. Packages that can perform Concurrent Sizing, Shaping and Topology Optimization is uncommon, if not extinct. However, the RGA (Robust Genetic Algorithm) in SmartDO is developed to solve the Concurrent Sizing, Shaping and Topology Optimization.
In this issue of the SmartDO eNews, we will illustrate how Concurrent Sizing, Shaping and Topology Optimization can be done in SmartDO.
Description of the Problem
We need to design a supporting structure inside a confined space to support the loads as indicated in Figure 1. The loading potion can not be changed. The goal is to design a truss and define its cross-section (sizing), nodal position (shaping) and rod connectivity (topology). The objective is minimize the material consumption. The stress and the displacement must be under the allowable values.

Figure 1 The Conceptual Sketch of a Truss Design, Including Cross-Section (Sizing), Nodal Position (Shaping) and Rod Connectivity (Topology)
Design Optimization Modeling
With SmartDO there are many different ways for Concurrent Sizing Shaping and Topology Optimization. Here we will use the method called the "Ground Structure" modeling approach", where we build the "ground structure" as shown in Figure 2. The ground structure basically defines all the nodes and connectivity's that can appears in a structure. Here in Figure 2 we defines totally 10 elements (rods) and 6 nodes. Then we will perform design changes on this ground structure, including which elements should be kept or removed.

Figure 3 SmartDO Can Assign Cross-Sectional Table as Design Variables for Each Element
Shaping Design
We will use the X and Y coordinates of nodes 4 and 5 as the design variables, adding 4 design variables. The coordinates of nodes 2 and 3 are not assigned design variables, because they are loading points and can not be moved.
Topology Design
One of the meaning of topology in structural design, is to decide the connectivity's between nodes, Theoretically speaking, when there are n nodes in the structure, totally there can be 2^m possible connectivity's pattern, where m=[n*(n-1)/2 ]. From the ground structure in Figure 2, there will be around 3.52E13 possible connectivity's.
For such kinds of design problems, SmartDO can link the existence of elements as design variables. Take the example of Figure 2, we assign elements 2 to 10 to 8 design variables respectively, each one representing a "0 or 1" option. When the design variable of one element(rod) is assigned as "1" it means this element (rod) will be kept. Otherwise (when the variable is 0), the element (rod) will be removed. (Here we do not assign the existence of element 1 and 2 as design variables, because they are applied with the loads and can not be removed). Under our current configuration, there are around 2.68E8 possible connectivity patterns. Of course, SmartDO will try to find the optimum design with minimum computational cost.
There are totally 22 design variables in our modeling mentioned above.
Initial Designs
When you are using the RGA in SmartDO, you don't need to design initial designs. Of course, the user can still provide one or more initial design. And good initial designs always accelerate the convergence.
Controlling Parameters
Important controlling parameters of GA like population size and generation number are all calculated. Of course, the users can also assigned these parameters if they want.
Combining with other CAE software
Many CAE software does not have the macro language. When the "if/then/else" statement are not available, it is rather difficult to perform topology optimization like what we have done here. However, the PET (Preprocessor for Embedded Tcl/Tk) functionality in SmartDO enable you to embedded Tcl/Tk-like statement in any text mode batch file. This makes it possible for SmartDO to interact with almost any packages.
Final Results
After being optimized by SmartDO, the structure evolves like Figure 4. The final design is shown in the bottom of Figure 4. The consumption of material is saved around 80%.
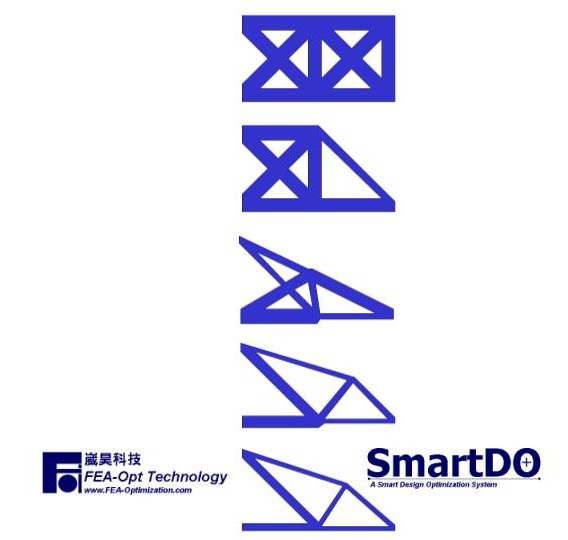
Figure 4 The Evolution of Structural Design in SmartDO
Compared with Other Packages
From this example, we can see SmartDO has at least the following advantages over other packages.
(1) SmartDO can perform Concurrent Sizing, Shaping and Topology Optimization. And the result is quantitative. It is not the conceptual design as other topology optimization approach.
(2) SmartDO can assign topology as design variables, which is difficult for, if not impossible, for other packages.
(3) SmartDO is much more computational effective than other packages. For the example here, a design with 22 design variable will take tremendous amount of computational cost under the traditional Design of Experiment (DOE) or Takuchi approach.
The Response Smoothing Technology has been applied in many industrial application, and proved to solve many problems not possible for others packages. For more information about the Response Smoothing Technology, please see our Paper Archive and SmartDO Examples.
The Robust Genetic Algorithms (RGA)
The Genetic Algorithms (GA) has been widely accepted since 1995. One of the reasons is the simplicity of the algorithms itself, which allows the code to be written without much effort. However, they are many drawbacks of GAs that can be easily overlooked, which includes
(1) The convergence of GA is not guaranteed. There is even no mathematics to prove GA's convergence in the early days.
(2) GA is very computational expensive.
(3) GA has difficulties handling constraints.
Conclusion and Remarks
In this issue of the SmartDO eNews, we introduced how you can perform Concurrent Sizing, Shaping and Topology Optimization in SmartDO. In the future, we will continue to develop more Smart Global Optimization Technology, and will keep you posted in our eNews.
Reference
More Information
FEA-Opt Technology Co. Ltd. is an international RD/Consultancy/CAE and Software firm. We provide superior RD/consultancy services to our customers, and customized solutions for each customer's special need.
SmartDO, our flagship product, is the leader of Smart Global Optimization Technology. Capable of Direct Global Search for both Gradient-Based and GA-Based methodology. For details about SmartDO, please visit our web site at http://www.SmartDO.co/